








摘要:本文探讨了马斯克的纯视觉方案与激光雷达方案,分析了两者在算力与门槛方面的挑战。纯视觉方案依赖强大的算法和算力支持,而激光雷达方案则面临技术门槛和成本问题。随着技术的发展和融合,纯视觉和激光雷达方案将逐渐融合,以实现更高效、更准确的自动驾驶技术。这一过程需要克服技术难题,降低门槛,并不断提升算力支持。
马斯克的纯视觉方案
马斯克的纯视觉方案主要依赖深度学习算法及大量的数据训练,通过摄像头捕获的图像信息实现自动驾驶,该方案具有普及性和可扩展性的优势,因为摄像头作为最常见的传感器之一,易于部署和获取,纯视觉方案对算力要求较高,需要强大的计算机处理能力来解析和处理海量的图像数据,因此技术门槛相对较高。
激光雷达方案
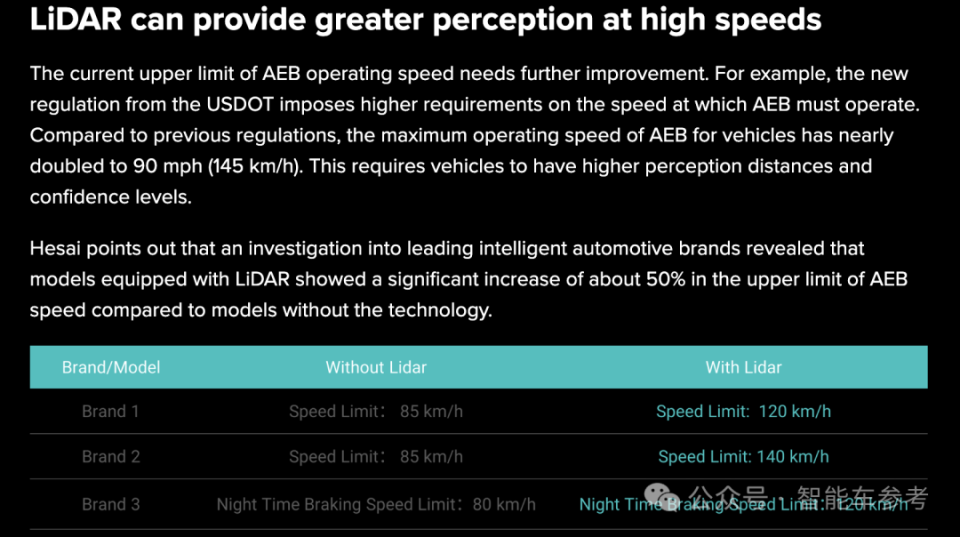
与纯视觉方案不同,激光雷达方案主要通过激光雷达(LiDAR)获取车辆周围环境的三维数据以实现自动驾驶,激光雷达方案在环境感知方面具有较高的精度和稳定性,尤其对于复杂环境下的自动驾驶具有显著优势,激光雷达的成本相对较高,且其部署和集成相对复杂,尽管如此,许多企业已经掌握了激光雷达方案的相关技术,其门槛相对较低。
两种方案的比较
1、算力要求:纯视觉方案对算力的要求远高于激光雷达方案,视觉识别和处理需要大量的计算资源,而激光雷达通过直接获取三维数据,计算量相对较小。
2、门槛:如上所述,纯视觉方案的门槛较高,需要深厚的计算机视觉和机器学习技术积累;而激光雷达方案的门槛相对较低。
3、成本:目前激光雷达的成本相对较高,但随着技术的进步和规模化生产,成本有望降低,纯视觉方案的成本则主要取决于摄像头的数量和算力需求。
未来的终极方案:合二为一的可能性
考虑到纯视觉方案和激光雷达方案各自的优点和局限性,未来的终极方案可能是两者的结合,纯视觉方案可以提供丰富的环境信息,提高自动驾驶的感知能力,而激光雷达可以提供精确的三维数据,弥补视觉感知的不足,随着技术的进步和成本的降低,将两者结合可以实现优势互补,进一步提高自动驾驶的可靠性和安全性。
马斯克的纯视觉方案和激光雷达方案各有优势和局限性,随着技术的不断进步和成本的降低,我们有望在未来看到更加完善的自动驾驶技术,而未来的终极方案可能是纯视觉和激光雷达两种方案的融合,这一融合将为实现全面自动驾驶带来更大的可能性,为整个社会带来变革,我们共同期待这一美好未来的实现。

