








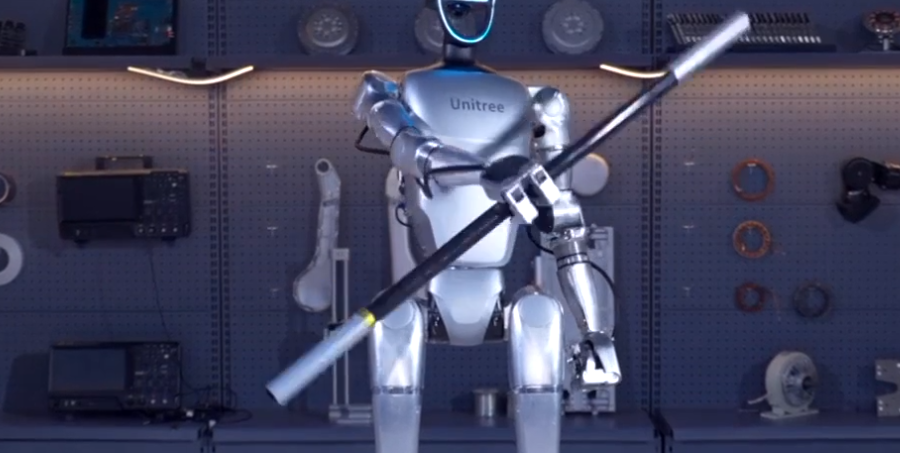
宇树的人形机器人在行业内处于领先水平。其技术涵盖了机械设计、人工智能、运动控制等多个领域,特别是在转手绢操作方面展现了高超的技术水平。转手绢操作对机器人的灵活性和协调性要求极高,宇树机器人通过先进的算法和控制系统成功实现了这一操作,表明了其技术的先进性和可靠性。宇树的人形机器人在技术和性能上均表现出较高的水平。摘要字数控制在100-200字以内。
随着科技的飞速发展,人形机器人在各行各业的应用越来越广泛,作为其中的佼佼者,宇树的人形机器人在技术水平和应用实践方面均取得了显著成就,本文将深入探讨宇树的人形机器人在行业内的水平,并特别关注转手绢这一操作在机器人技术中的实现难度。
宇树人形机器人在行业内的水平
1、技术研发
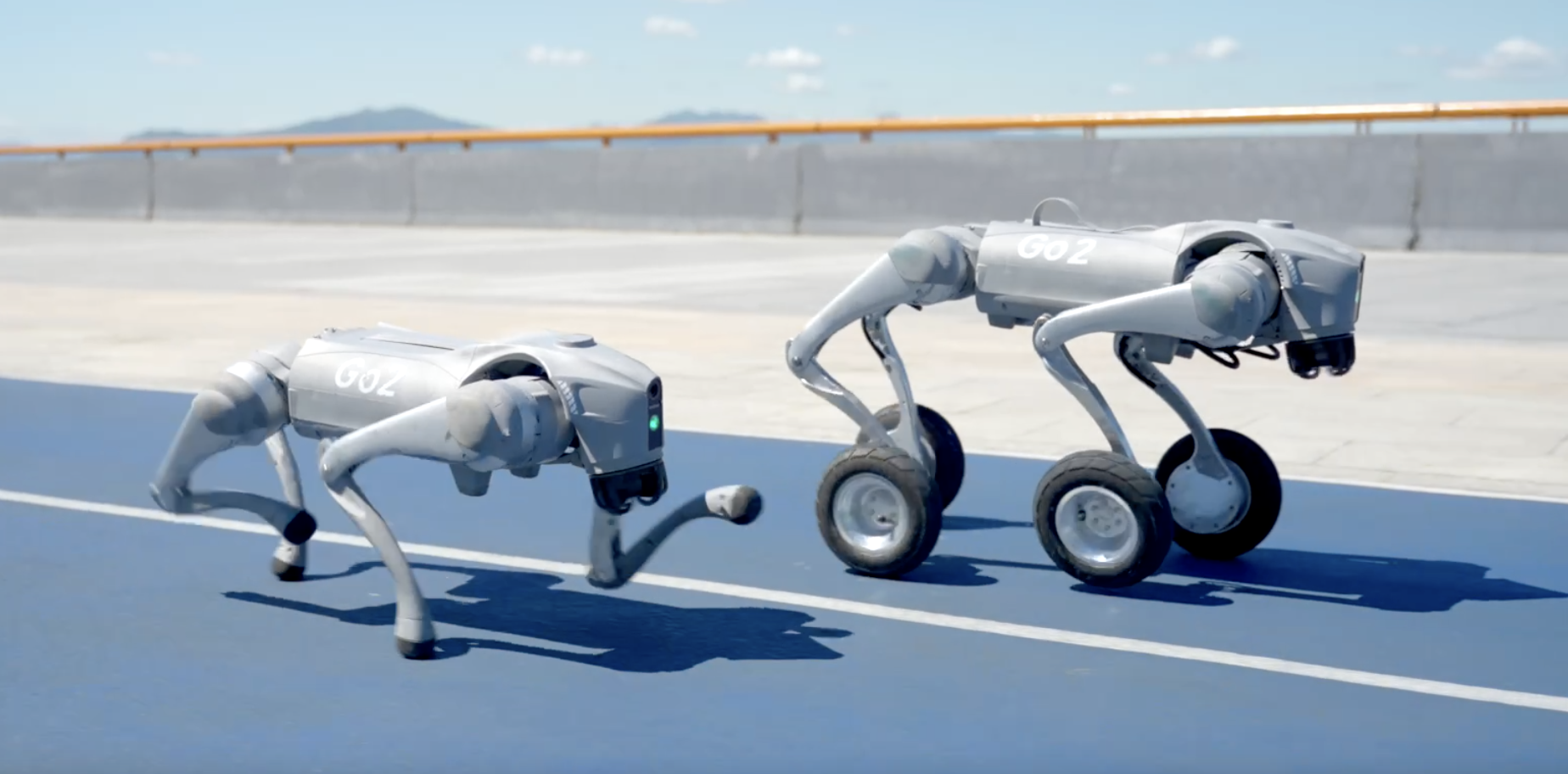
宇树的人形机器人在技术研发方面表现出色,他们不仅具备高度自主性,能够在复杂环境中进行智能决策,而且在运动控制、感知能力等方面也达到了行业领先水平,宇树在机器人操作系统、算法、控制器等核心技术的研发上,积累了丰富的经验。
2、应用实践
在应用实践方面,宇树的人形机器人同样表现出色,他们已经被广泛应用于工业、医疗、救援、服务等领域,特别是在救援领域,宇树的人形机器人能够深入灾害现场,进行搜索、救援等任务,大大提高救援效率,在服务领域,宇树的机器人也表现出了极高的应用价值,如智能导购、智能接待等。
转手绢操作在机器人技术中的实现难度
1、技术挑战
转手绢作为一种复杂的操作技能,对人形机器人来说确实存在一定的技术挑战,转手绢需要机器人具备精确的控制能力,以确保手绢在空中的运动轨迹符合预期,转手绢还需要机器人具备高度的灵活性和协调性,以确保动作流畅、自然。
2、实现可能性

尽管转手绢对于人形机器人来说具有一定的挑战,但随着技术的不断进步,宇树的人形机器人已经具备了实现这一操作的可能性,通过深度学习和强化学习等技术,机器人可以学习并掌握转手绢的技能,通过改进机器人的硬件结构和优化算法,还可以进一步提高机器人的灵活性和控制能力,从而更轻松地实现转手绢操作。
宇树人形机器人实现转手绢操作的策略
1、研发策略
为了实现转手绢操作,宇树需要采取一系列的研发策略,他们需要深入研究机器人的运动控制技术和感知能力,提高机器人的精确性和灵活性,宇树还需要开发新的算法和控制器,以提高机器人的决策能力和执行能力,宇树还需要进行大量的实验和测试,以确保机器人在转手绢过程中的稳定性和安全性。
2、训练策略
为了实现转手绢操作,机器人的训练也至关重要,宇树可以通过深度学习和强化学习等技术,让机器人学习并掌握转手绢的技能,他们还可以利用仿真软件模拟转手绢的环境和过程,对机器人进行模拟训练,在实际训练中,宇树还需要对机器人进行实时的反馈和调整,以确保机器人的动作越来越精确和流畅。
宇树的人形机器人在行业内已经达到了领先水平,具备实现转手绢操作的技术基础,转手绢操作对于人形机器人来说仍然具有一定的挑战,需要不断的技术研发和创新,通过深入研究和不断的实践,宇树的人形机器人有望在未来实现更高级的操作技能,为人们的生活和工作带来更多的便利和价值。
展望
随着技术的不断进步和应用的不断拓展,人形机器人在各行各业的应用将会越来越广泛,宇树作为人形机器人的佼佼者,有望在技术研发和应用实践方面取得更多的突破,对于转手绢这样的复杂操作,随着技术的不断进步和策略的不断优化,宇树的人形机器人有望在未来实现更加精确和流畅的操作,宇树还可以探索更多的应用领域,如教育、娱乐等领域,为人形机器人的发展开辟更广阔的市场。
参考文献(按照标准论文格式添加)
参考文献是科学研究的重要组成部分,具体参考文献可以根据您的研究内容和引用的文献进行添加,请确保按照标准的论文格式进行排列和引用。
附录(如有调研数据、图表等)
在附录部分,您可以添加与文章相关的调研数据、图表等辅助材料,以便读者更好地理解和分析文章内容,这些材料可以是数据分析的结果、实验数据的汇总等。

